


Article Figures & Data
Figures
- Figure 1
Graf ligament (SEM, Créteil, France) consists of 8 mm braided polyester non-elastic tension bands between pedicle screws (reprinted with permission).
- Figure 2
Dynesys (DYnamic NEutralization SYStem, Zimmer Spine, Minneapolis, Minnesota) consists of a cylindrical polycarbonate urethane (PCU) spacer with a tensioned polyethylene terephthalate (PET) cord tunnelled through the PCU spacer (reprinted with permission from Zimmer Spine, Inc.).
- Figure 3
Twinflex (SpineNetwork, Beaurains, France) consists of two 2.5 mm twin rods (reprinted with permission).
- Figure 4
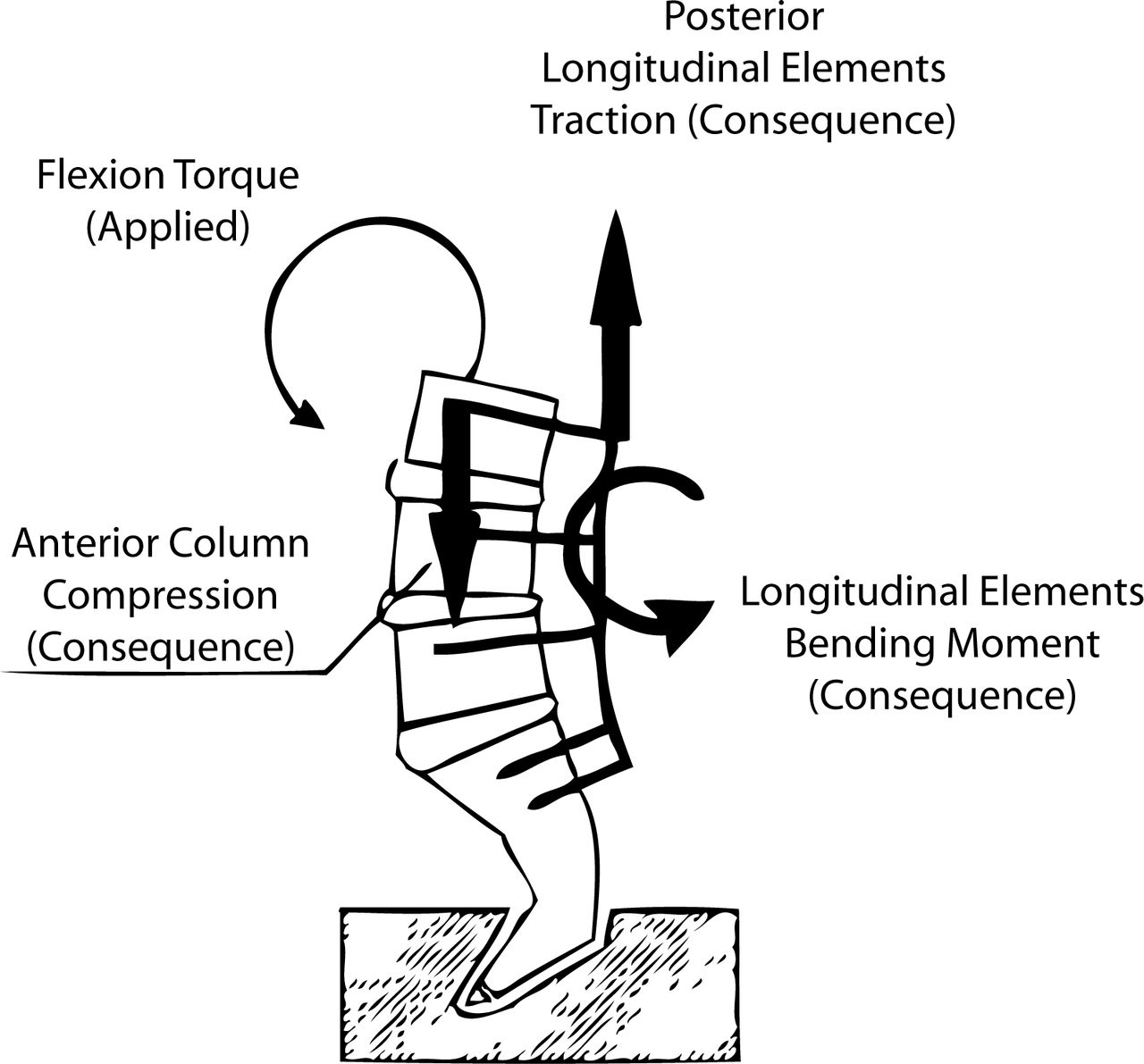
In flexion, predominant load transfers through the system depends on instrumentation stiffness: A dynamic system results in anterior compression and posterior traction while a rigid system results in axial pull-out forces at the ends of the construct.22
- Figure 5
Isobar TTL (1997, evolution of Isolock device, Scient'x, Guyancourt, France) consists of 5.5 mm titanium alloy rod and a damper that reduces stiffness and allows a limited amount of angular and axial micromotion (reprinted with permission).
- Figure 6
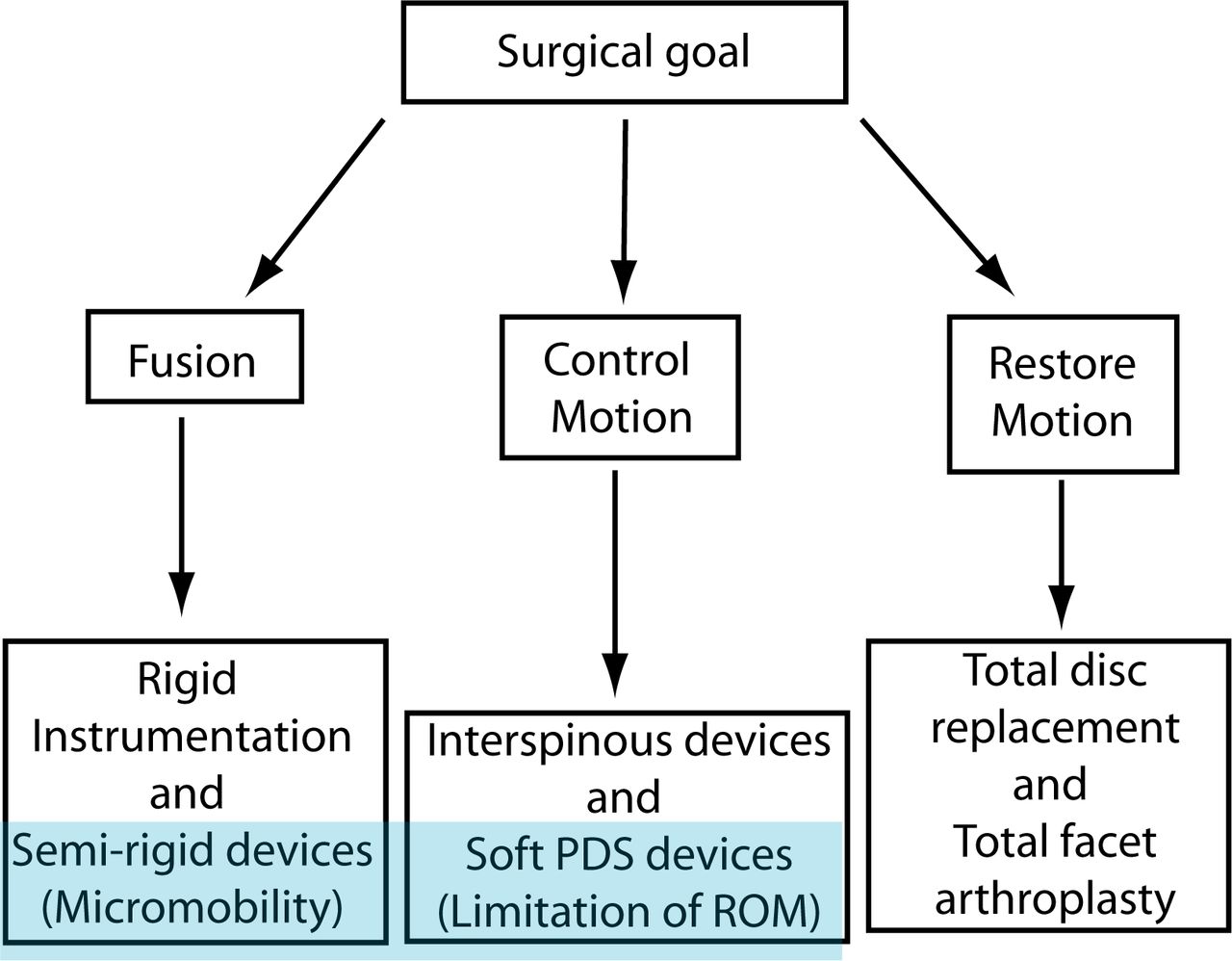
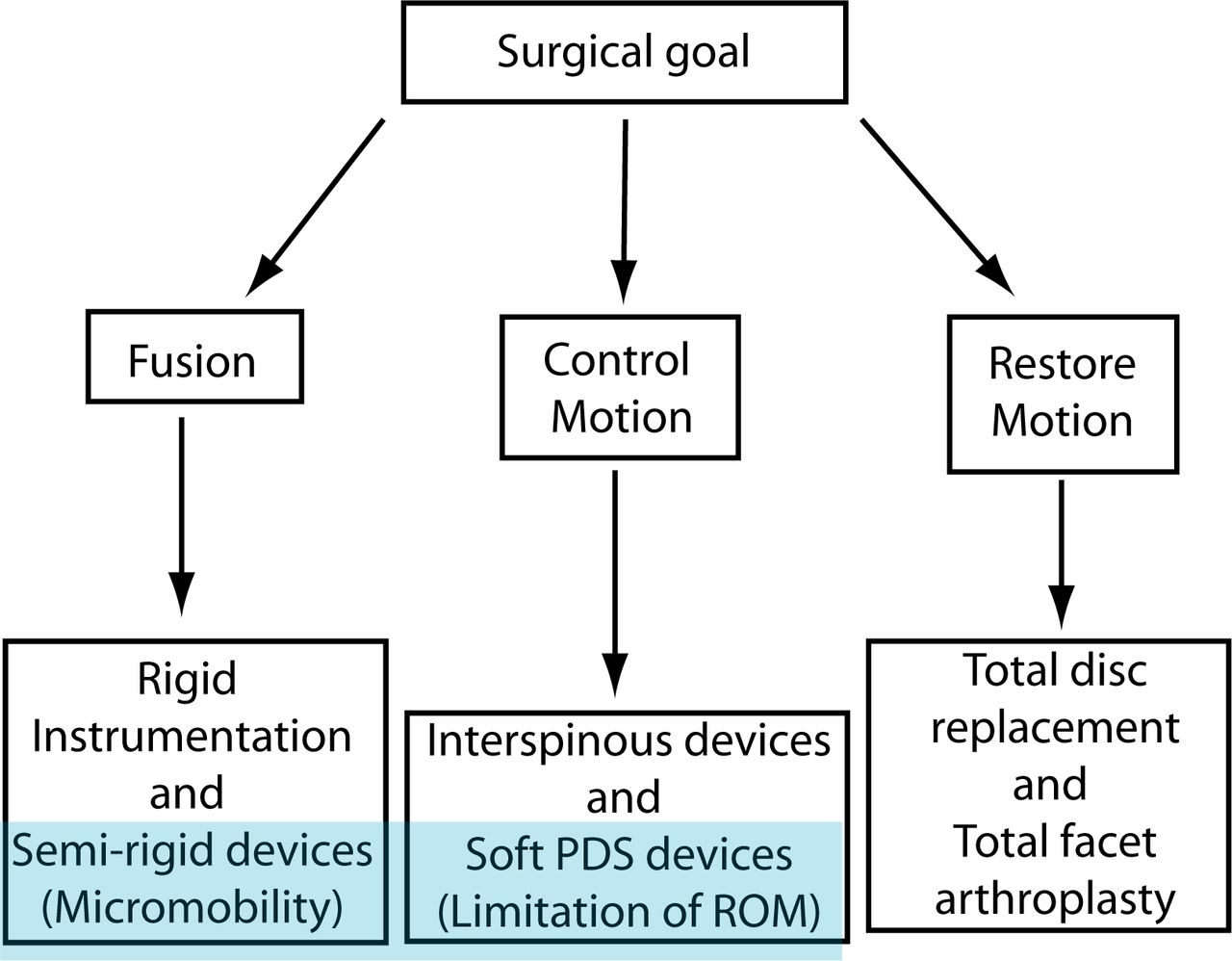
“Soft” PDS systems have to be differentiated from “semirigid” dynamic instrumentation with which a fusion is generally intended.
- Figure 7
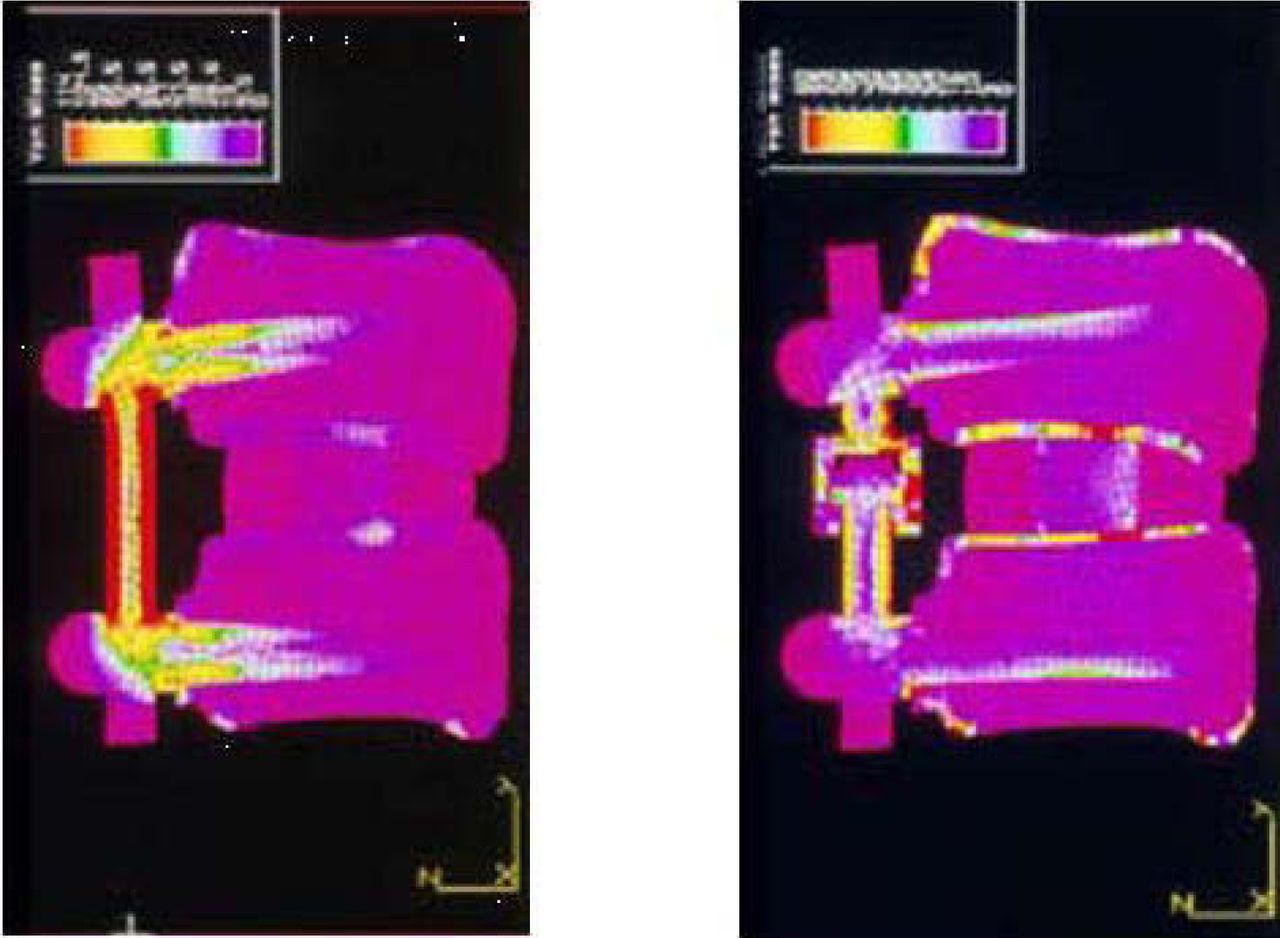
Finite element analysis comparing load distribution according to rigid (left) versus dynamic (right) instrumentation (with permission from F Lavaste and G Perrin, Laboratory of Biomechanics, ENSAM-PARISTECH, Paris, unpublished data, 1993).
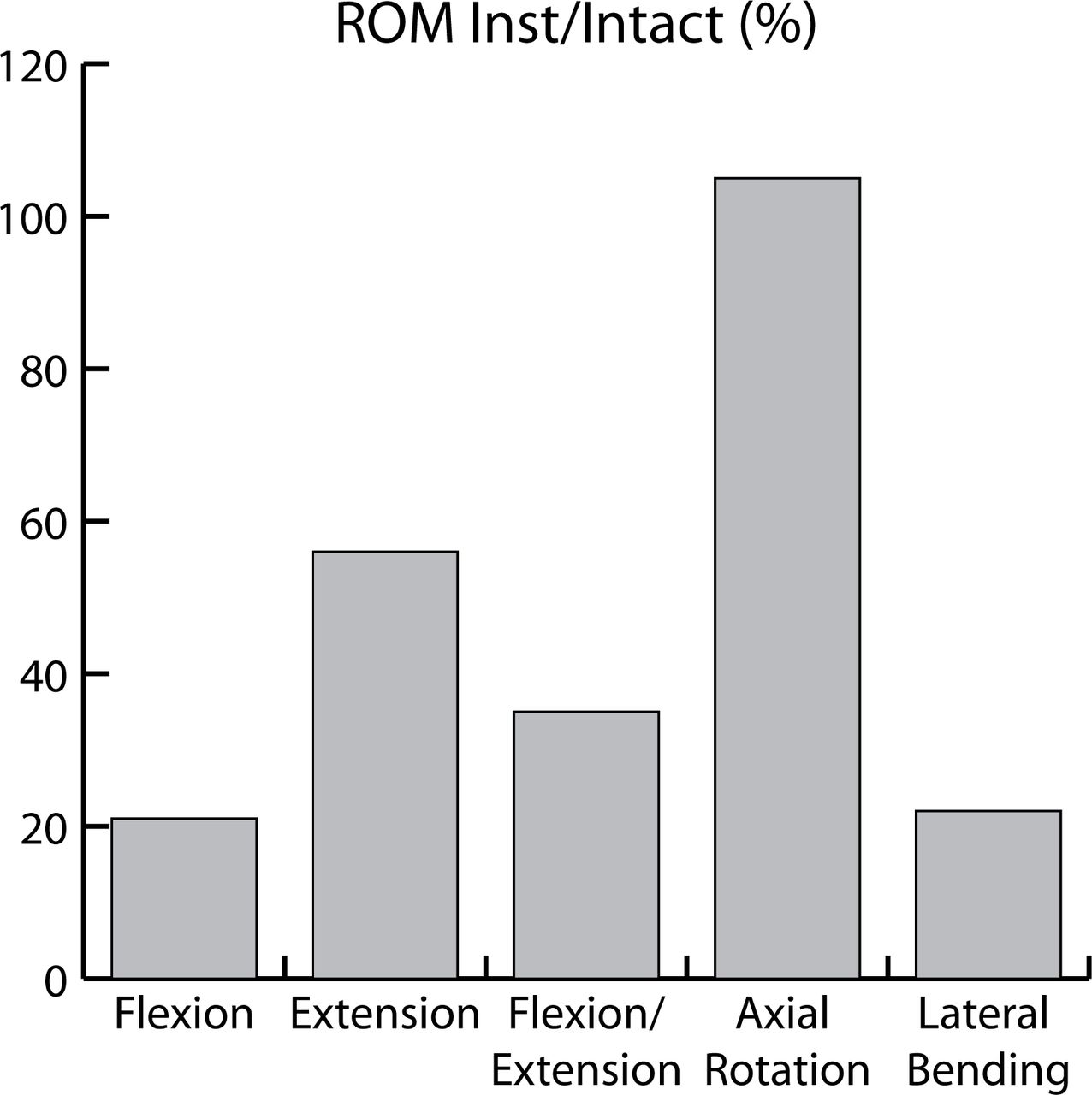
- Figure 8
ROM following implantation of the Dynesys implant compared to ROM of the intact spines (averaged results from 4 different human cadaveric in vitro studies).
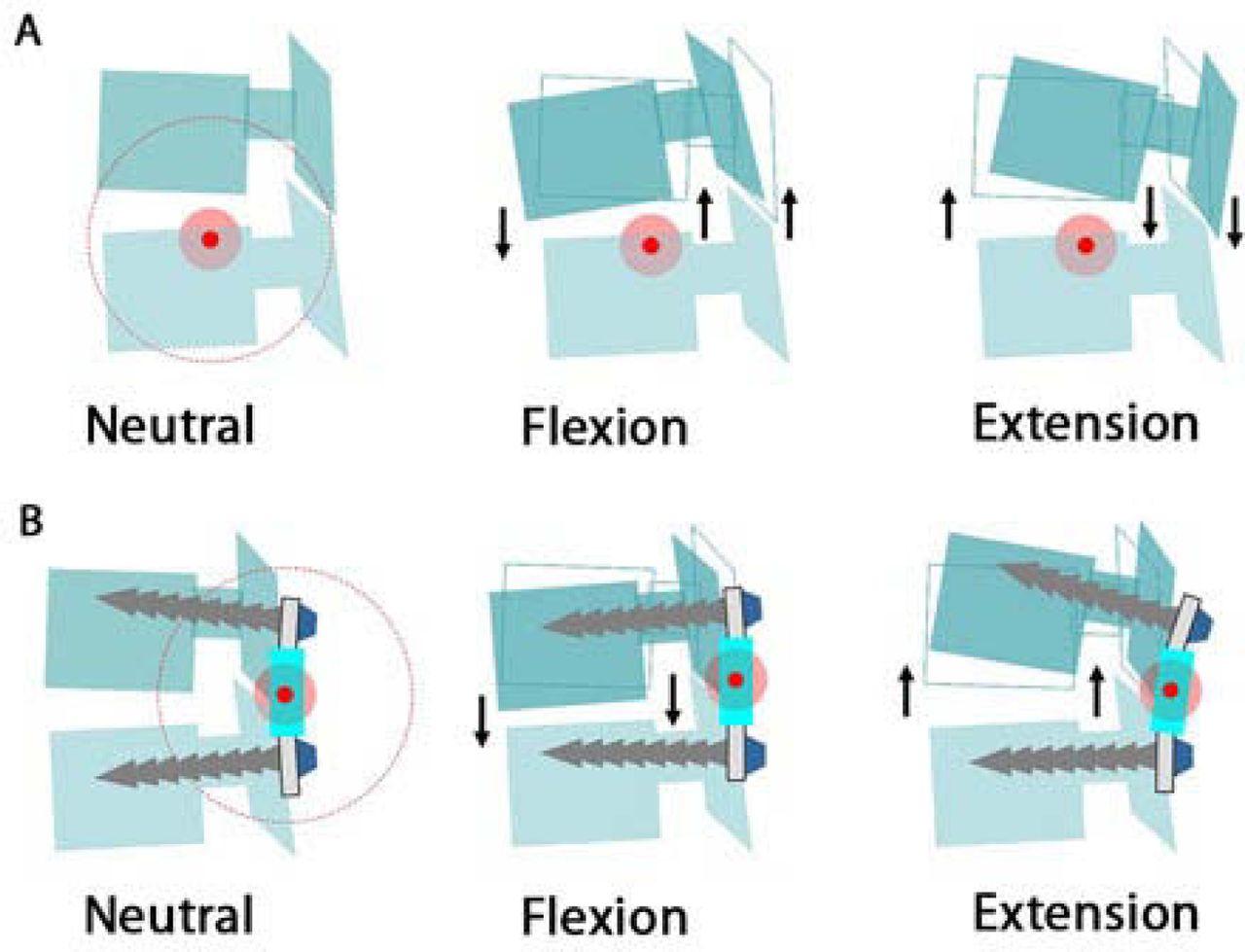
- Figure 9
Consequences of posterior shift of the helical axis of motion on intervertebral kinematics in flexion-extension.








Tables
- Table 1
Summary of In Vitro Studies Involving Pedicle Screw-Based PDS Devices Currently Available for Use Clinically
References n Protocol Parameter(s) Device Strauss et al., 199412 13 Axial compressive load of 500 N, and pure moments of 10 Nm in F/E, LB, and AR; Intact/Injured/Instrumented Balance point, compressive compliance, and ROM in F/E, LB, and AR Graf ligament Freudiger et al., 199914 4 18.3 Nm flexion moments and 12.5 Nm extension moments; Intact/Instrumented ROM in F/E and translations (horizontal, and vertical) Dynesys Schmoelz et al., 200315 6 Pure moments of 10 Nm in F/E, LB, and AR; Intact/Injured/Instrumented/Rigid ROM in F/E, LB, and AR Dynesys Schmoelz et al., 200616 6 Pure moments of 10 Nm in F/E, LB, and AR; Intact/Injured/Instrumented/Rigid Intradiscal pressure Dynesys Niosi et al., 200617 10 Pure moments of 7.5 Nm in F/E, LB, and AR; Intact/Injured/Instrumented/long spacer/short spacer NZ, location of the HAM, and ROM in F/E, LB, and AR Dynesys Xu et al., 200621 6 pure moments of 10 Nm in F/E, LB, and AR; Intact/Injured/Instrumented/Rigid ROM in F/E, LB, and AR Osteotech Cheng et al., 200718 12 Pure moments of 6 Nm in F/E, LB, and AR; Intact/Injured/Instrumented ROM in F/E, LB, and AR Dynesys Meyers et al., 200820 5 Testing in F/E, LB, and axial compression of 210 N, and 630 N; Instrumented Moments within the pedicle screws Dynesys Niosi et al., 200819 10 Pure moments of 7.5 Nm in F/E, LB, and AR; Intact/Instrumented Facets loads Dynesys ROM - Range of motion
F/E - Flexion/Extension
LB - Lateral bending
AR - Axial rotation
NZ - Neutral zone
HAM - Helical axis of motion
- Table 2
Ranges of Motion of Intact, Injured, and Instrumented Spines From the Study of Strauss on Graf System (in Degrees)
Level INTACT INJURED INSTRUM with Graf Ligament % (Inst/ Int) Flexion/ Extension L2-L3 (n = 7) 7.5 ± 3.2 9.7 ± 3.6 3.8 ± 2.6 48 L4-L5 (n = 6) 11.6 ± 2.9 14.3 ± 3.7 4.5 ± 2.2 39 Axial Rotation L2-L3 (n = 7) 4.1 ± 2.5 6.5 ± 3.3 5.4 ± 2.4 132 L4-L5 (n = 6) 5.4 ± 2.1 7.1 ± 2.7 5.8 ± 2.5 107 Lateral Bending L2-L3 (n = 7) 9.4 ± 2.8 10.6 ± 4.5 6.6 ± 4.3 70 L4-L5 (n = 6) 9.9 ± 3.3 10.2 ± 3.8 4.4 ± 2.6 45 % = (ROMinstrum/ROMintact)×100
Study INTACT INJURED INSTRUM with Dynesys % (Inst/ Int) Flexion Cheng et al. - - - - Niosi et al. 3.7 ± 1.5 6.1 ± 1.4 1 ± 0.6 27 Schmoelz et al. 5 ± 2.4 7.6 ± 4.2 1 ± 2.3 20 Freudiger et al. 9.6 ± 1.7 - 4.3 ± 0.9 45 Extension Cheng et al. - - - - Niosi et al. 3.3 ± 1.5 4.4 ± 1.2 1.1 ± 0.7 33 Schmoelz et al. 4 ± 2.4 7.3 ± 5.9 3.8 ± 4.2 94 Freudiger et al. 2.1 ± 1 - 1.1 ± 0.9 52 Flexion/extension Cheng et al. 5.2 ± 2.7 6.6 ± 3.7 1.3 ± 0.4 25 Niosi et al. 7 10.5 2.1 30 Schmoelz et al. 9 15 4.8 53 Freudiger et al. 11.7 - 5.4 46 Axial rotation Cheng et al. 4.1 ± 1.8 5 ± 2.1 4.2 ± 1.9 102 Niosi et al. 4.2 ± 1.8 5.6 ± 2.4 3.2 ± 2 76 Schmoelz et al. 2.1 4.9 3.8 181 Freudiger et al. - - - - Lateral bending Cheng et al. 4.9 ± 2.2 5.3 ± 2.6 2 ± 0.8 40 Niosi et al. 7.6 ± 2.8 10 ± 3.6 2 ± 1 26 Schmoelz et al. 9 15 2.5 28 Freudiger et al. - - - - Cheng et al.,18 n = 6, L3-L4 tested, pure moment of ± 6 Nm, without preload
Niosi et al.,17 n = 10, L3-L4 tested, pure moment of ± 7.5 Nm, without preload
Schmoelz et al.,15 n = 6, L3-L4 tested, pure moment of ± 10 Nm, no axial preload
Freudiger et al.,14 n = 4, L4-L5 tested, 18.3 Nm flexion moment and 12.5 Nm extension moment
% = (ROMinstrum/ROMintact)×100
- Table 4
Summary of FEA Studies Involving Pedicle Screw- Based Dynamic Stabilization Devices (Currently Available and Used Clinically)
References Methods Parameter(s) Device Templier et al., 199822 3D geometris FE L3-sacrum model Semirigid / rigid Load transmission throughout the FSU and the instrumentation following application of a flexion moment Twinflex Zander et al., 200624 3D non linear FE Model of the lumbosacral spine Intact/Dynamic below rigid instrumentation ROM, intradiscal pressure, facet joints forces and implant stresses In standing, 30° flexion, 20° extension, 10° axial rotation Fictional device similar to Dynesys Rohlmann et al., 200723 3D non linear FE Model of the lumbosacral spine Dynamic/Rigid ROM, intradiscal pressure, facet joints forces and implant stresses In standing, 30° flexion, 20° extension, 10° axial rotation Fictional device similar to Dynesys Castellvi et al., 200525 3D non linear FE Model of the lumbosacral spine Semirigid/ Rigid Adjacent level stresses Under flexion (45°), extension and axial loading ISOBAR TTL FE Finite element
FSU Functional Spine Unit
ROM Range of motion
Loading Condition Schmoelz et al.16 In Vitro Study Zander et al. 24 FEA Rohlmann et al.23 FEA PDS Rigid PDS PDS Rigid Standing NT NT NS ↓ ↓↓ Flexion NS NS NS NS NS Extension ↓↓ ↓↓ NS ↓ ↓↓ Lat Bend ↓ ↓ NT NT NT Axial Rot ↑ ↓ NS NS NS NT Not tested
NS Not significant
In this issue




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Jump to section
Related Articles
Cited By...
- No citing articles found.