


Article Figures & Data
Figures
- Figure 1
Cartesian Coordinate System and Conceptual Framework for Spinal Kinematics – Schematic representation of a fixed 3-dimensional Cartesian coordinate system for calculation of rigid body transformation in millimeters (mm) translation and degrees (deg) rotation along three orthogonal axes – X, Y and Z (A). This is in accordance to the axial (Y), sagittal (Z) and coronal (X) anatomic planes as defined by Panjabi's 3-dimensional conceptual framework for spinal kinematics (B).
- Figure 2
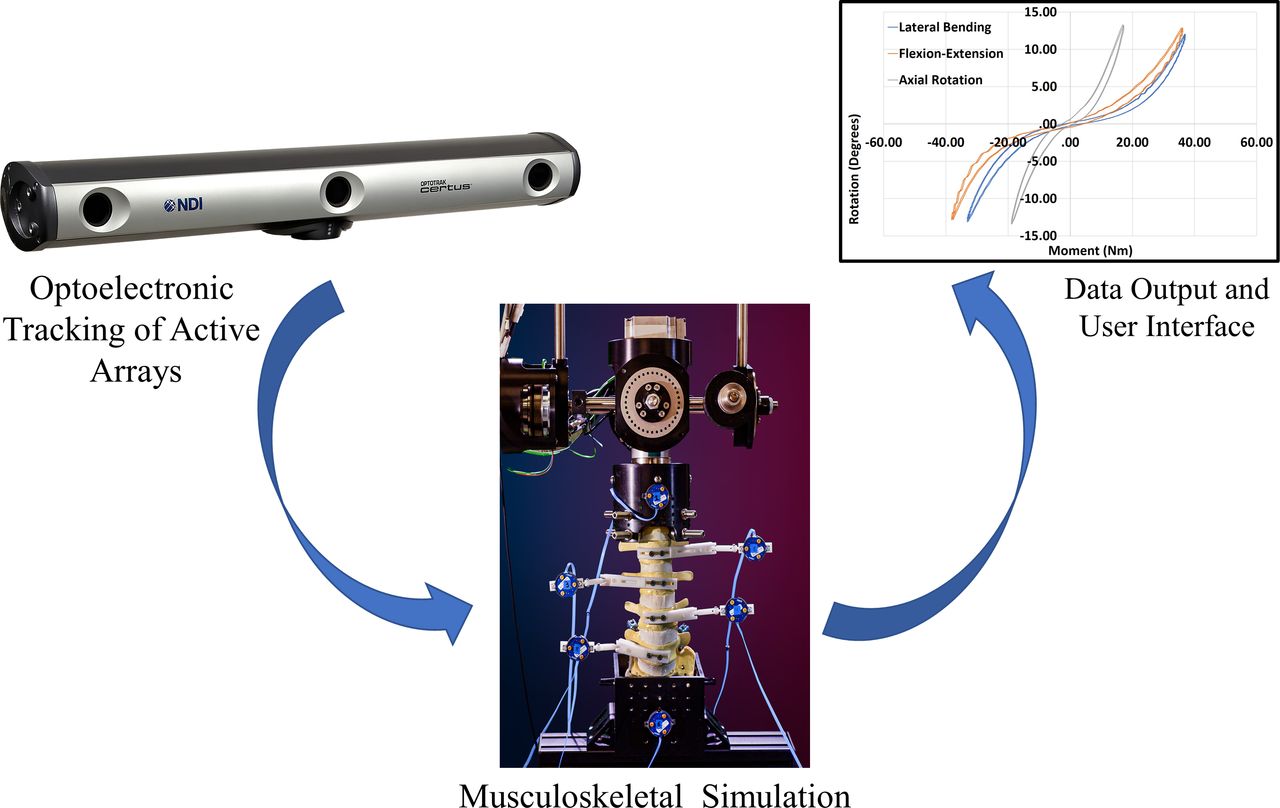
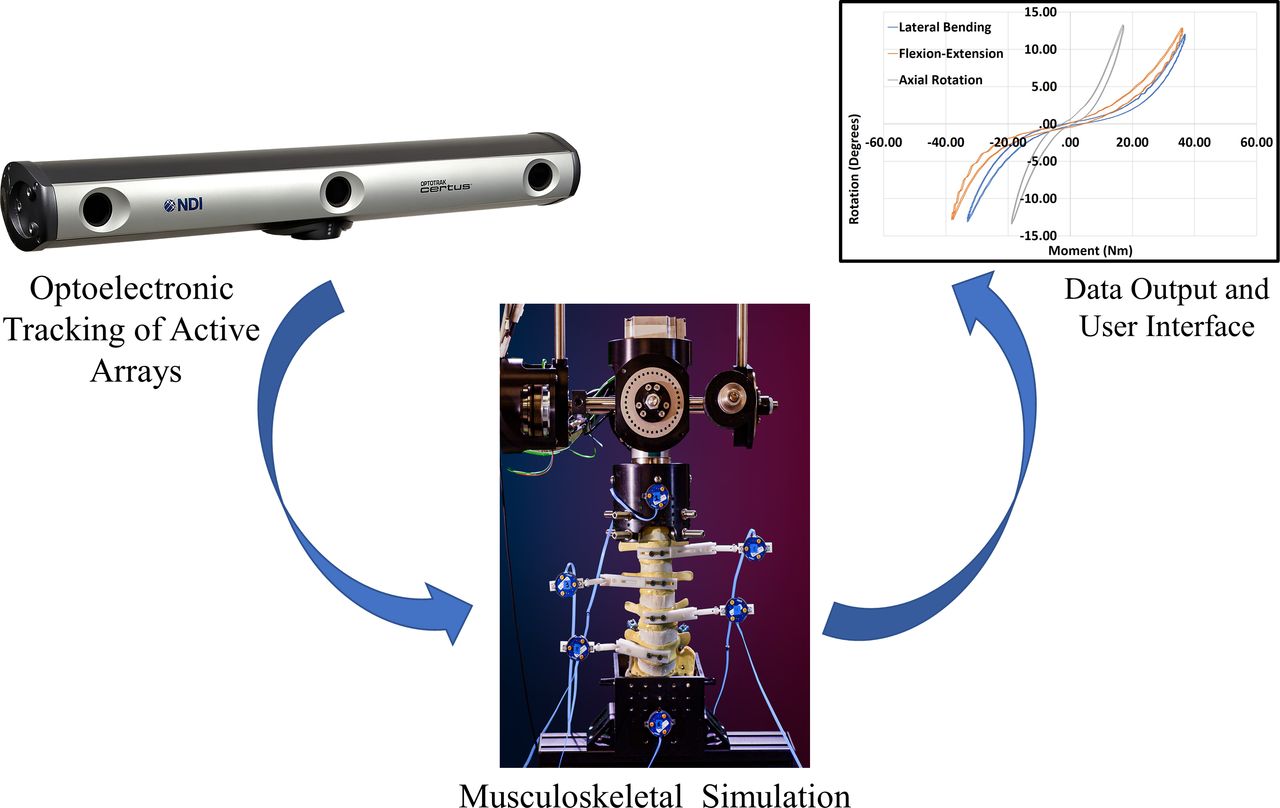
Laboratory Platform for Optoelectronic Data Transference Process - Schematic illustration demonstrating the laboratory workflow and process for data transference utilizing optoelectronic tracking. The camera source visualizes the active fiducial arrays affixed to the vertebral elements and transfers the data directly to the user interface for computational analysis. The collective effect of testing methodology and limited experimental coordinate transformations between data input / output reduces error propagation and maximizes optoelectronic accuracy.
- Figure 3
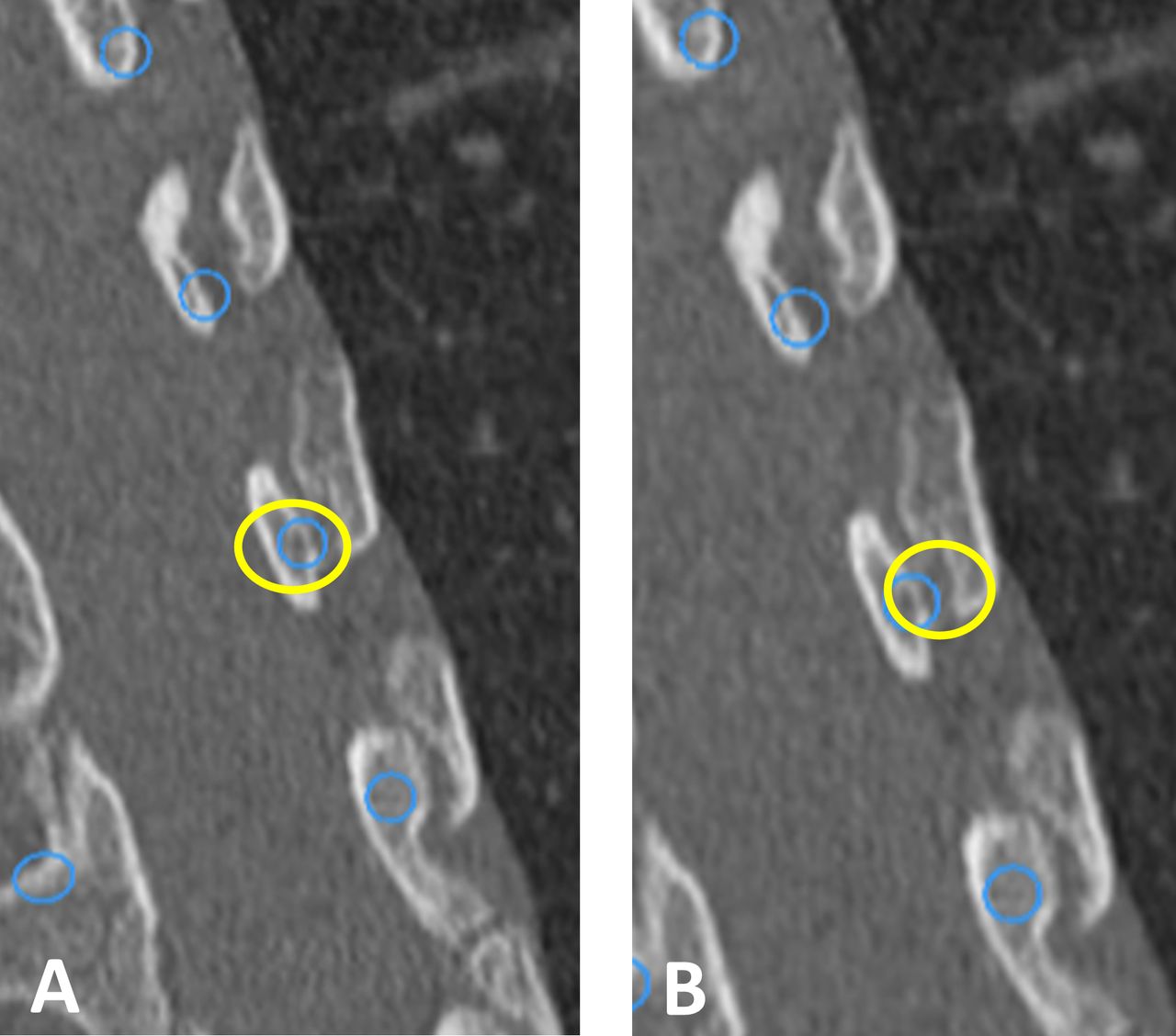
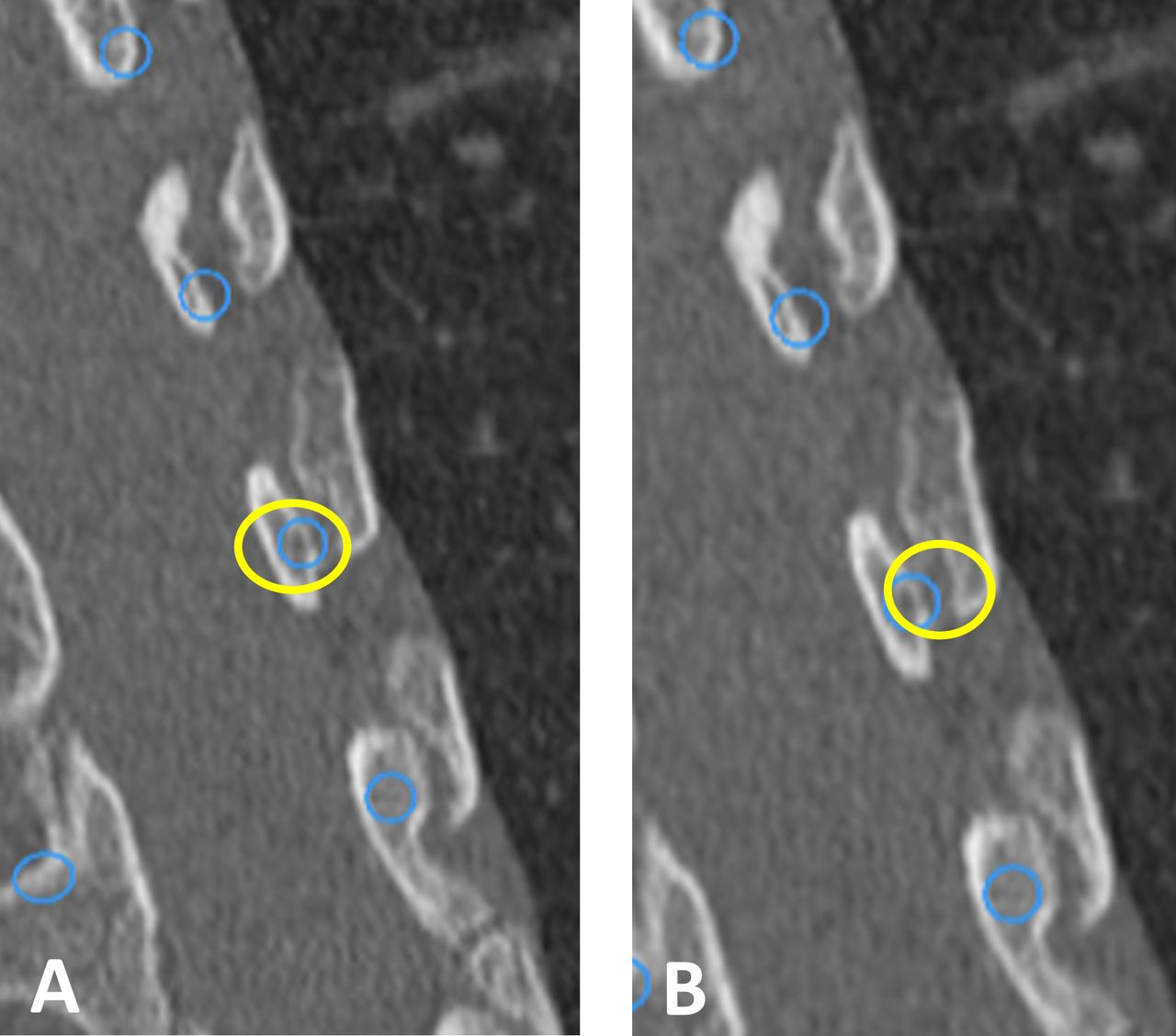
Computed Tomographic Images – Computed tomographic images demonstrating comparative pedicle screw insertion techniques of “Old School” versus “New School” methods. The Old School technique includes probing the center of the pedicle, intramedullary blunt pedicle finder, and concentrically expanding the pedicle to permit screw insertion (A). The New School navigated technique utilizes a more outside-in converging trajectory permitting preservation of the medial pedicle wall (B). Note the change in position of the circle defining region of insertion corridor.
- Figure 4
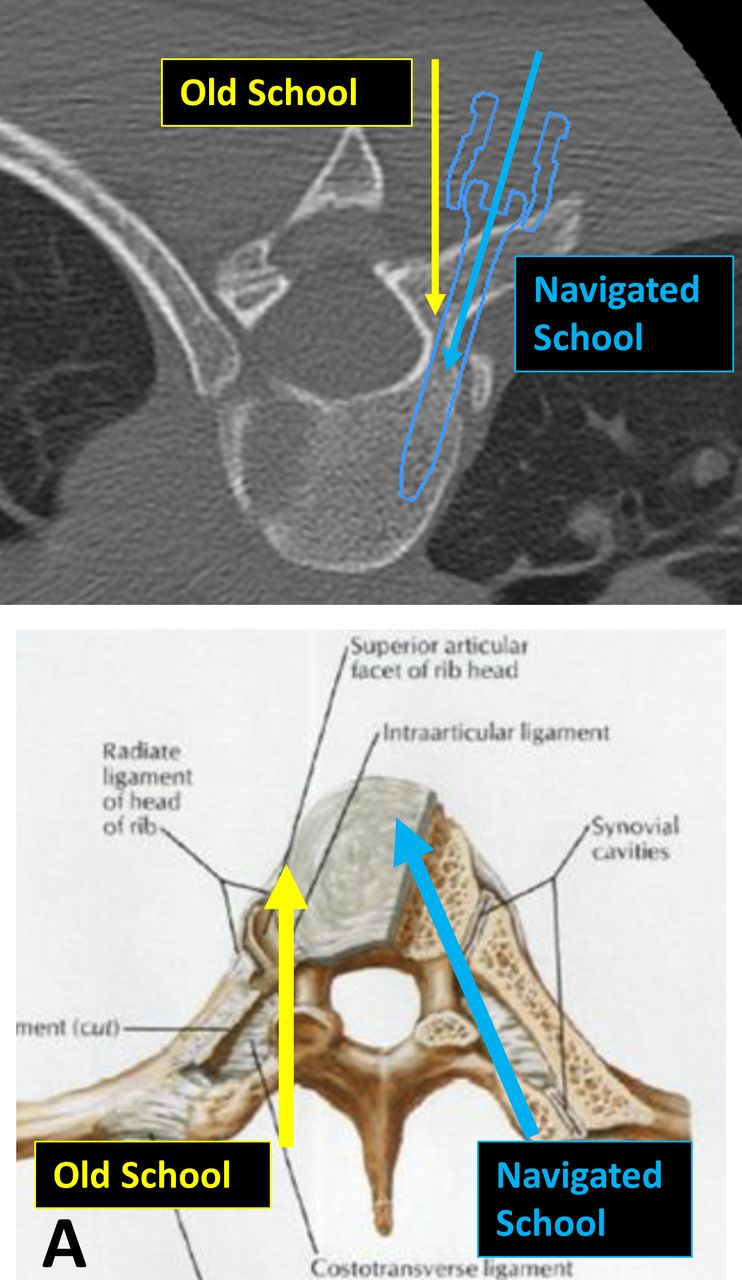
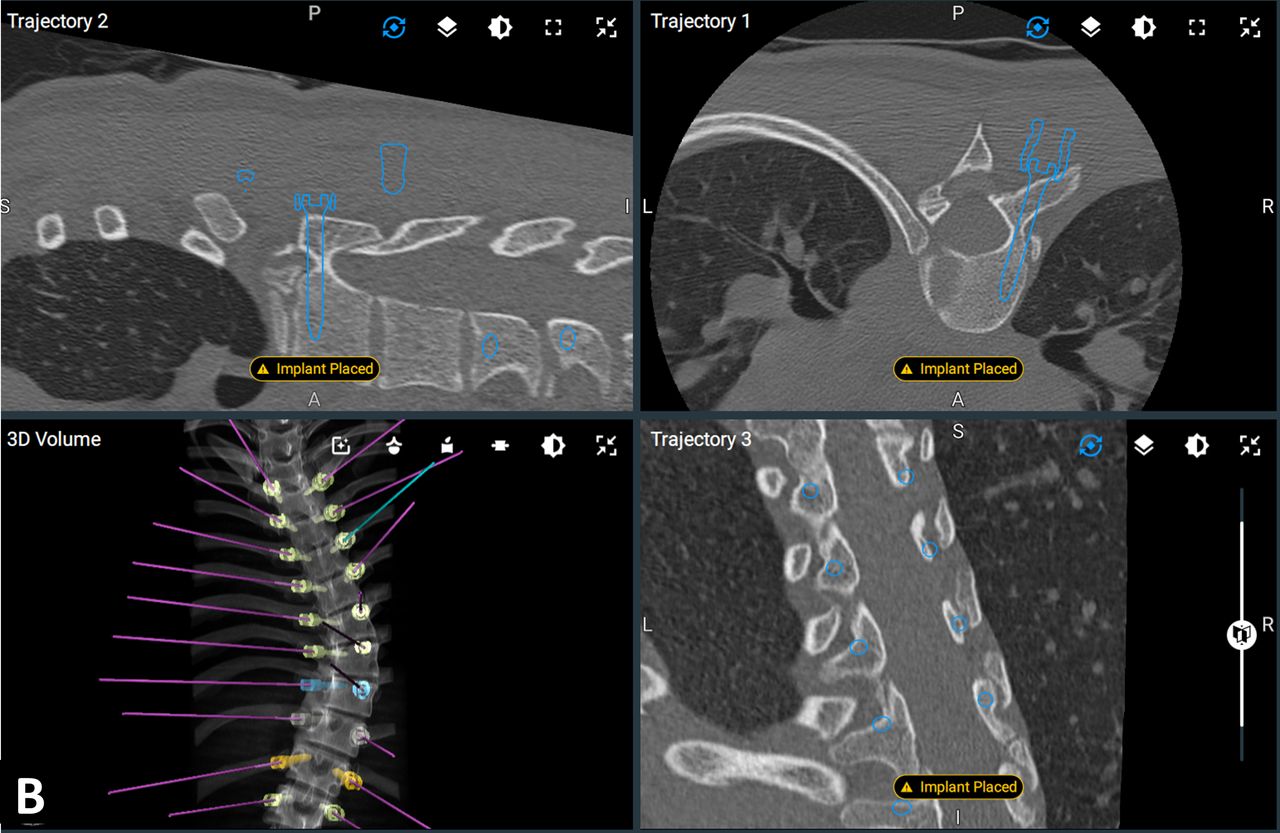
Computed Tomographic and Schematic Images of Pedicle Screw Trajectory – The New Navigated School permits the surgeon to maximize pedicular fixation by incorporation of the entire costovertebral complex as showing the computed axial tomographic and schematic illustrations (A). As such, longer and larger diameter pedicle screws (5.5 mm versus 4.5 mm) can be inserted, while avoiding breach of the medial pedicle wall (B).
- Figure 4
Continued.
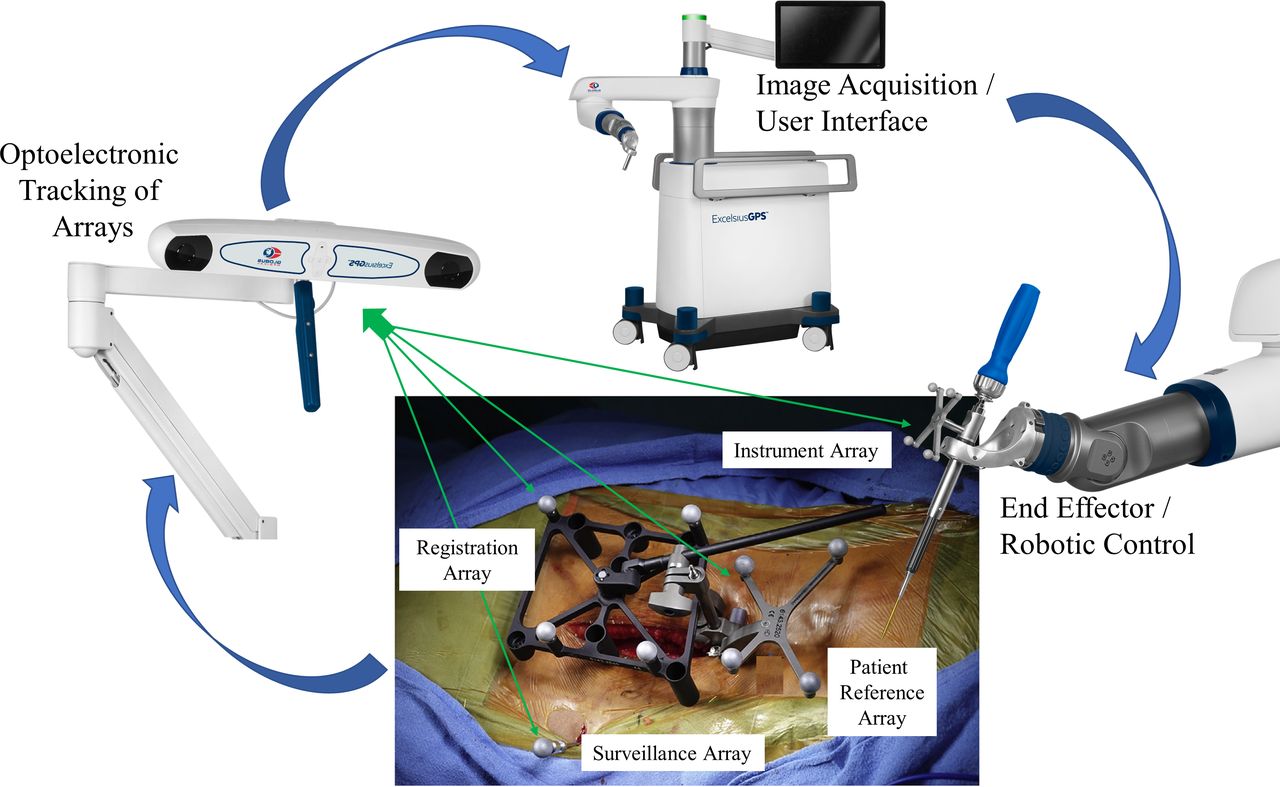
- Figure 5
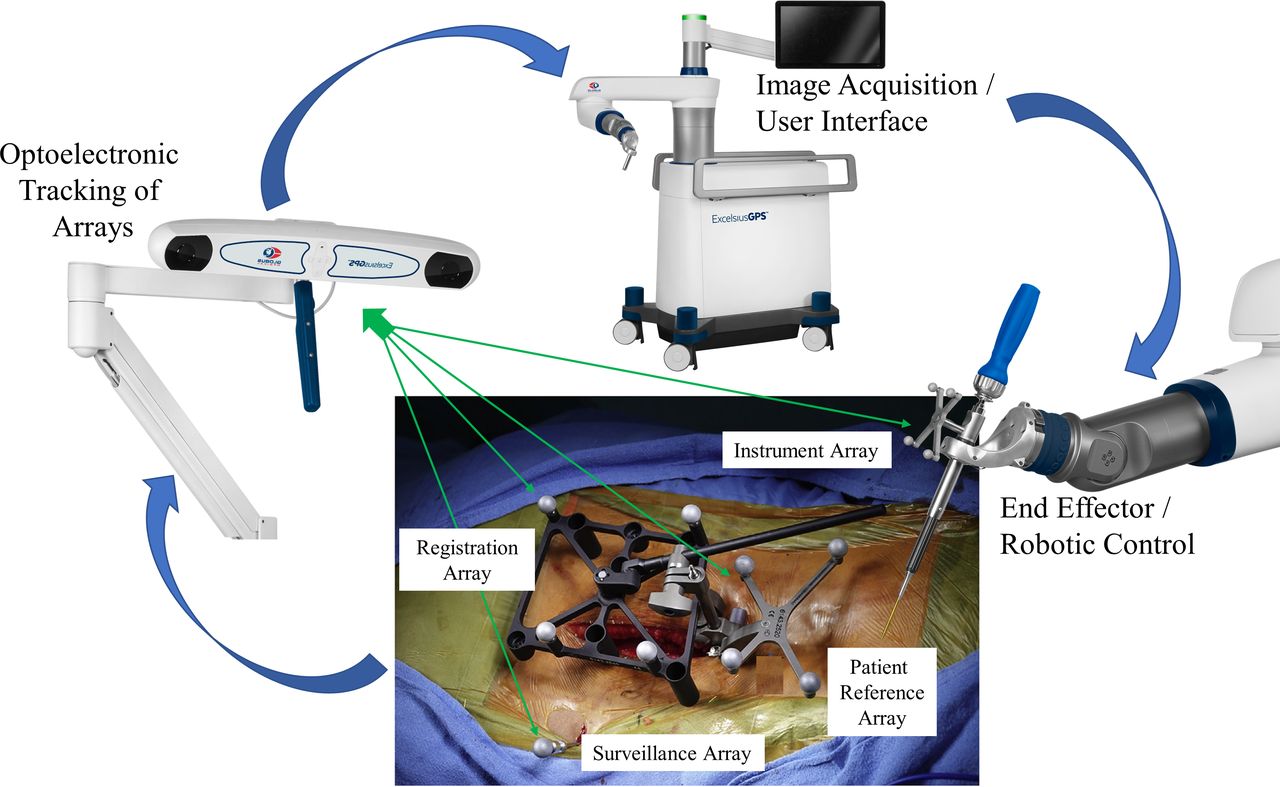
Clinical Platform for Optoelectronic Data Transference Process – Schematic illustration demonstrating the operative clinical workflow and process for data transference utilizing optoelectronic tracking. Unique to robotic-assisted surgery and in difference to the laboratory setting, the intra-operative process requires considerably more steps in the transference of optoelectronic kinematic data. This complex workflow process integrates correlation and mapping algorithms to register the physical patient to the virtual patient via the navigation system, optoelectronic source, surveillance markers, patient reference markers, end effector instruments in the operative field, and patient CT images. Accurate, close-to-ideal reference reproducibility and maintenance of this dataset is the primary intra-operative objective and challenge.



Tables
In this issue





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Jump to section
Related Articles
Cited By...
- No citing articles found.